Structure of SASS
Multimodality Data Collection System
Build a robust and synchronized data collection system to gather information from multiple camera views and IMU sensors.

REID Feature Extraction
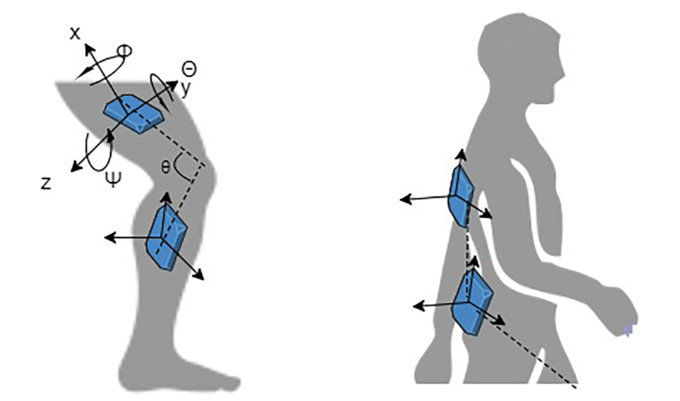
Extract useful features from the collected dataset, such as 2D/3D pose, gait characteristics, and IMU-based features.
Feature Evaluation & Correlation
Evaluate the effectiveness of different features for REID and tracking tasks, and analyze the correlations among these features.